Analytic geometry
Analytic geometry has two different meaning in mathematics. Except for the section Modern analytic geometry, this article treats the classical and elementary meaning, which is a synonymous of coordinate geometry. The modern and advanced meaning refers to the geometry of analytic varieties, whose object is sketched in Section Modern analytic geometry, below.
Analytic geometry, also known as coordinate geometry, analytical geometry, or Cartesian geometry, is the study of geometry using a coordinate system and the principles of algebra and analysis. This contrasts with the synthetic approach of Euclidean geometry, which treats certain geometric notions as primitive, and uses deductive reasoning based on axioms and theorems to derive truth. Analytic geometry is the foundation of most modern fields of geometry, including algebraic geometry, differential geometry, and discrete and computational geometry, and is widely used in physics and engineering.
Usually the Cartesian coordinate system is applied to manipulate equations for planes, straight lines, and squares, often in two and sometimes in three dimensions of measurement. Geometrically, one studies the Euclidean plane (2 dimensions) and Euclidean space (3 dimensions). As taught in school books, analytic geometry can be explained more simply: it is concerned with defining geometrical shapes in a numerical way and extracting numerical information from that representation. The numerical output, however, might also be a vector or a shape. That the algebra of the real numbers can be employed to yield results about the linear continuum of geometry relies on the Cantor-Dedekind axiom.
Contents |
History
The Greek mathematician Menaechmus solved problems and proved theorems by using a method that had a strong resemblance to the use of coordinates and it has sometimes been maintained that he had introduced analytic geometry.[1] Apollonius of Perga, in On Determinate Section, dealt with problems in a manner that may be called an analytic geometry of one dimension; with the question of finding points on a line that were in a ratio to the others.[2] Apollonius in the Conics further developed a method that is so similar to analytic geometry that his work is sometimes thought to have anticipated the work of Descartes — by some 1800 years. His application of reference lines, a diameter and a tangent is essentially no different than our modern use of a coordinate frame, where the distances measured along the diameter from the point of tangency are the abscissas, and the segments parallel to the tangent and intercepted between the axis and the curve are the ordinates. He further developed relations between the abscissas and the corresponding ordinates that are equivalent to rhetorical equations of curves. However, although Apollonius came close to developing analytic geometry, he did not manage to do so since he did not take into account negative magnitudes and in every case the coordinate system was superimposed upon a given curve a posteriori instead of a priori. That is, equations were determined by curves, but curves were not determined by equations. Coordinates, variables, and equations were subsidiary notions applied to a specific geometric situation.[3]
The eleventh century Persian mathematician Omar Khayyám saw a strong relationship between geometry and algebra, and was moving in the right direction when he helped to close the gap between numerical and geometric algebra[4] with his geometric solution of the general cubic equations,[5] but the decisive step came later with Descartes.[4]
Analytic geometry has traditionally been attributed to René Descartes[4][6][7] who made significant progress with the methods when in 1637 in the appendix entitled Geometry of the titled Discourse on the Method of Rightly Conducting the Reason in the Search for Truth in the Sciences, commonly referred to as Discourse on Method. This work, written in his native French tongue, and its philosophical principles, provided the foundation for Infinitesimal calculus in Europe.
Abraham de Moivre also pioneered the development of analytic geometry. With the assumption of the Cantor-Dedekind axiom, essentially that Euclidean geometry is interpretable in the language of analytic geometry (that is, every theorem of one is a theorem of the other), Alfred Tarski's proof of the decidability of the ordered real field could be seen as a proof that Euclidean geometry is consistent and decidable.
Basic principles

Coordinates
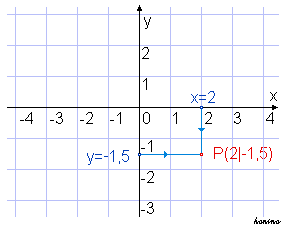
In analytic geometry, the plane is given a coordinate system, by which every point has a pair of real number coordinates. The most common coordinate system to use is the Cartesian coordinate system, where each point has an x-coordinate representing its horizontal position, and a y-coordinate representing its vertical position. These are typically written as an ordered pair (x, y). This system can also be used for three-dimensional geometry, where every point in Euclidean space is represented by an ordered triple of coordinates (x, y, z).
Other coordinate systems are possible. On the plane the most common alternative is polar coordinates, where every point is represented by its radius r from the origin and its angle θ. In three dimensions, common alternative coordinate systems include cylindrical coordinates and spherical coordinates.
Equations of Curves
In analytic geometry, any equation involving the coordinates specifies a subset of the plane, namely the solution set for the equation. For example, the equation y = x corresponds to the set of all the points on the plane whose x-coordinate and y-coordinate are equal. These points form a line, and y = x is said to be the equation for this line. In general, linear equations involving x and y specify lines, quadratic equations specify conic sections, and more complicated equations describe more complicated figures.
Usually, a single equation corresponds to a curve on the plane. This is not always the case: the trivial equation x = x specifies the entire plane, and the equation x2 + y2 = 0 specifies only the single point (0, 0). In three dimensions, a single equation usually gives a surface, and a curve must be specified as the intersection of two surfaces (see below), or as a system of parametric equations. The equation x2 + y2 = r2 is the equation for any circle with a radius of r.

Distance and angle
In analytic geometry, geometric notions such as distance and angle measure are defined using formulas. These definitions are designed to be consistent with the underlying Euclidean geometry. For example, using Cartesian coordinates on the plane, the distance between two points (x1, y1) and (x2, y2) is defined by the formula

which can be viewed as a version of the Pythagorean theorem. Similarly, the angle that a line makes with the horizontal can be defined by the formula
where m is the slope of the line.
Transformations
Transformations are applied to parent functions to turn it into a new function with similar characteristics. For example, the parent function y=1/x has a horizontal and a vertical asymptote, and occupies the first and third quadrant, and all of its transformed forms have one horizontal and vertical asymptote,and occupies either the 1st and 3rd or 2nd and 4th quadrant. In general, if y=f(x), then it can be transformed into y=af(b(x-k))+h. In the new transformed function, a is the factor that vertically stretches the function if it is greater than 1 or vertically compresses the function if it is less than 1, and for negative a values, the function is reflected in the x-axis. The b value compresses the graph of the function horizontally if greater than 1 and stretches the function horizontally if less than 1, and like a, reflects the function in the y-axis when it is negative. The k and h values introduce translations, h, vertical, and k horizontal. Positive h and k values mean the function is translated to the positive end of its axis and negative meaning translation towards the negative end.
Intersections
Themes
Important themes of analytical geometry are
- vector space
- definition of the plane
- distance problems
- the dot product, to get the angle of two vectors
- the cross product, to get a perpendicular vector of two known vectors (and also their spatial volume)
- intersection problems
Many of these problems involve linear algebra.
Example
Here an example of a problem from the United States of America Mathematical Talent Search that can be solved via analytic geometry:
Problem: In a convex pentagon  , the sides have lengths
, the sides have lengths  ,
,  ,
,  ,
,  , and
, and  , though not necessarily in that order. Let
, though not necessarily in that order. Let  ,
,  ,
,  , and
, and  be the midpoints of the sides
be the midpoints of the sides  ,
,  ,
,  , and
, and  , respectively. Let
, respectively. Let  be the midpoint of segment
be the midpoint of segment  , and
, and  be the midpoint of segment
be the midpoint of segment  . The length of segment
. The length of segment  is an integer. Find all possible values for the length of side
is an integer. Find all possible values for the length of side  .
.
Solution: Without loss of generality, let  ,
,  ,
,  ,
,  , and
, and  be located at
be located at  ,
,  ,
,  ,
,  , and
, and  .
.
Using the midpoint formula, the points , , , , , and are located at
 ,
,  ,
,  ,
,  ,
,  , and
, and 
Using the distance formula,
and
Since has to be an integer,

(see modular arithmetic) so  .
.
Modern analytic geometry
An analytic variety is defined locally as the set of common solutions of several equations involving analytic functions. It is analogous to the included concept of real or complex algebraic variety. Any complex manifold is an analytic variety. Since analytic varieties may have singular points, not all analytic varieties are manifolds.
Analytic geometry is essentially equivalent to real and complex Algebraic geometry as it has been shown by Jean-Pierre Serre in his paper GAGA, whose name is, in French, Algebraic geometry and analytic geometric. Nevertheless, the two fields remain distinct, as the methods of proof are quite different and algebraic geometry includes also geometry in finite characteristic.
References
- ↑ Boyer, Carl B. (1991). "The Age of Plato and Aristotle". A History of Mathematics (Second Edition ed.). John Wiley & Sons, Inc.. pp. 94–95. ISBN 0471543977. "Menaechmus apparently derived these properties of the conic sections and others as well. Since this material has a strong resemblance to the use of coordinates, as illustrated above, it has sometimes been maintained that Menaechmus had analytic geometry. Such a judgment is warranted only in part, for certainly Menaechmus was unaware that any equation in two unknown quantities determines a curve. In fact, the general concept of an equation in unknown quantities was alien to Greek thought. It was shortcomings in algebraic notations that, more than anything else, operated against the Greek achievement of a full-fledged coordinate geometry."
- ↑ Boyer, Carl B. (1991). "Apollonius of Perga". A History of Mathematics (Second Edition ed.). John Wiley & Sons, Inc.. pp. 142. ISBN 0471543977. "The Apollonian treatise On Determinate Section dealt with what might be called an analytic geometry of one dimension. It considered the following general problem, using the typical Greek algebraic analysis in geometric form: Given four points A, B, C, D on a straight line, determine a fifth point P on it such that the rectangle on AP and CP is in a given ratio to the rectangle on BP and DP. Here, too, the problem reduces easily to the solution of a quadratic; and, as in other cases, Apollonius treated the question exhaustively, including the limits of possibility and the number of solutions."
- ↑ Boyer, Carl B. (1991). "Apollonius of Perga". A History of Mathematics (Second Edition ed.). John Wiley & Sons, Inc.. pp. 156. ISBN 0471543977. "The method of Apollonius in the Conics in many respects are so similar to the modern approach that his work sometimes is judged to be an analytic geometry anticipating that of Descartes by 1800 years. The application of references lines in general, and of a diameter and a tangent at its extremity in particular, is, of course, not essentially different from the use fo a coordinate frame, whether rectangular or, more generally, oblique. Distances measured along the diameter from the point of tangency are the abscissas, and segments parallel to the tangent and intercepted between the axis and the curve are the ordinates. The Apollonian relationship between these abscissas and the corresponding ordinates are nothing more nor less than rhetorical forms of the equations of the curves. However, Greek geometric algebra did not provide for negative magnitudes; moreover, the coordinate system was in every case superimposed a posteriori upon a given curve in order to study its properties. There appear to be no cases in ancient geometry in which a coordinate frame of reference was laid down a priori for purposes of graphical representation of an equation or relationship, whether symbolically or rhetorically expressed. Of Greek geometry we may say that equations are determined by curves, but not that curves are determined by equations. Coordinates, variables, and equations were subsidiary notions derived from a specific geometric situation; [...] That Apollonius, the greatest geometer of antiquity, failed to develop analytic geometry, was probably the result of a poverty of curves rather than of thought. General methods are not necessary when problems concern always one of a limited number of particular cases."
- ↑ 4.0 4.1 4.2 Boyer (1991). "The Arabic Hegemony". pp. 241–242. "Omar Khayyam (ca. 1050-1123), the "tent-maker," wrote an Algebra that went beyond that of al-Khwarizmi to include equations of third degree. Like his Arab predecessors, Omar Khayyam provided for quadratic equations both arithmetic and geometric solutions; for general cubic equations, he believed (mistakenly, as the sixteenth century later showed), arithmetic solutions were impossible; hence he gave only geometric solutions. The scheme of using intersecting conics to solve cubics had been used earlier by Menaechmus, Archimedes, and Alhazan, but Omar Khayyam took the praiseworthy step of generalizing the method to cover all third-degree equations (having positive roots). .. For equations of higher degree than three, Omar Khayyam evidently did not envision similar geometric methods, for space does not contain more than three dimensions, ... One of the most fruitful contributions of Arabic eclecticism was the tendency to close the gap between numerical and geometric algebra. The decisive step in this direction came much later with Descartes, but Omar Khayyam was moving in this direction when he wrote, "Whoever thinks algebra is a trick in obtaining unknowns has thought it in vain. No attention should be paid to the fact that algebra and geometry are different in appearance. Algebras are geometric facts which are proved.""
- ↑ Glen M. Cooper (2003). "Omar Khayyam, the Mathmetician", The Journal of the American Oriental Society 123.
- ↑ Stillwell, John (2004). "Analytic Geometry". Mathematics and its History (Second Edition ed.). Springer Science + Business Media Inc.. pp. 105. ISBN 0387953361. "the two founders of analytic geometry, Fermat and Descartes, were both strongly influenced by these developments."
- ↑ Cooke, Roger (1997). "The Calculus". The History of Mathematics: A Brief Course. Wiley-Interscience. pp. 326. ISBN 0471180823. "The person who is popularly credited with being the discoverer of analytic geometry was the philosopher René Descartes (1596-1650), one of the most influential thinkers of the modern era."
External links
- Coordinate Geometry topics with interactive animations
- Build analytic geometry objects